


Роботи, інтегровані у групи рибок та медоносних бджіл, дозволяють їм впливати на поведінку один одного. До такого висновку прийшли вчені у результаті проведеного експерименту.
Робот, що впливав на молодих медоносних бджіл у австрійському Граці, обмінювався інформацією з роботом, який плавав разом з рибками даніо у швейцарському місті Лозанна. Така комунікація роботів вплинула на поведінку кожної групи тварин.
«Це перший випадок, коли люди використовують такі технології для спілкування двох абсолютно різних видів» – говорить Саймон Гарньє, системний біолог з Технологічного інституту Нью-Джерсі, який не брав участі у дослідженні, але добре знайомий з його результатами.
Він додав: «Це підтвердження концепції, яка стверджує – роботи здатні виступати посередниками та впливати на різні групи живих організмів навіть на відстані». Але, у той же час, вчений заявив, що конкретне застосування отриманих результатів ще належить з’ясувати.
З розвитком робототехніки, біологи прагнуть використовувати її, створюючи роботів, які виглядають та поводяться, як тварини. Це дозволило дослідникам контролювати одну сторону соціальних взаємодій у дослідженнях поведінки тварин. Роботи, які успішно інтегруються у популяції тварин, також дають вченим можливість впливати на поведінку деяких їх груп.
«Наступний наш крок буде полягати у додаванні до групи функцій, які тварини не можуть виконати через відсутність у них відповідних можливостей» – сказав Хосе Халл, фізик з Паризького університету Дідро, який працював над розробкою роботів для інтелектуальної взаємодії з тваринами більше 10 років.
Він додав: «Проста, але, в той же час, вражаюча річ полягає у тому, що роботи можуть використовувати телекомунікації або Інтернет, а тварини не можуть цього зробити».
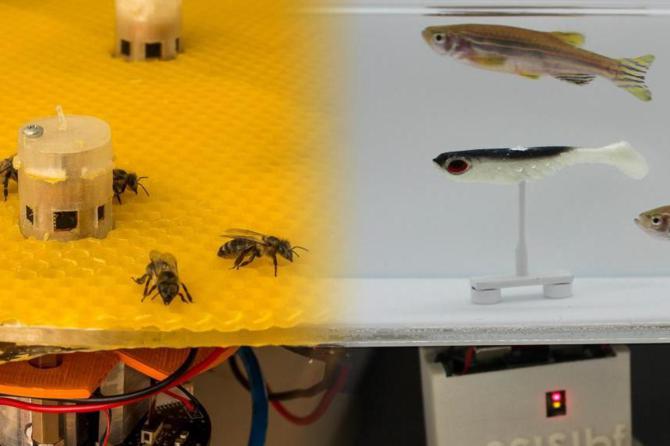
У новому експерименті Халл об’єднався зі співробітниками Швейцарського федерального технологічного інституту у Лозанні (EPFL), Університету Граца у Австрії та інших країн, щоб дві різних роботизованих тварини взаємодіяли за допомогою сучасних комунікаційних технологій. Дослідники працювали з двома абсолютно різними видами тварин, які зазвичай не взаємодіють у природі – медоносними бджолами та рибками даніо. Вони розмістили їх на відстані понад 1000 кілометрів один від одного.
Ризик виправдався
«Те, що ми зробили, було дуже ризиковано» – зізнається інженер EPFL Френк Боннет.
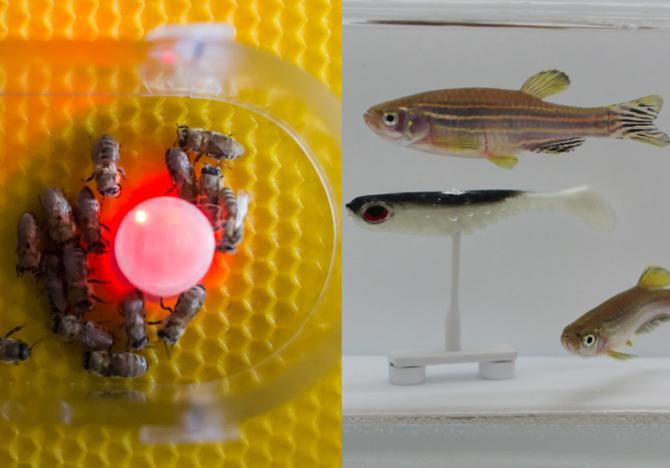
У ході експериментів роботи з бджолиної колонії та робот-риба взаємодіяли з реальними тваринами. У бджоли-робота були інфрачервоні датчики, які дозволяли їм оцінювати щільність прилеглих бджіл, та в міру того, як бджоли збиралися у групи, роботи виробляли більше тепла, мотивуючи більше бджіл збиратися навколо. Робот-риба визначав місцезнаходження риб за допомогою камери, що знімає акваріум, та реагував на зміни напрямку реальної риби, слідуючи більшості, що, в свою чергу, впливало на колективне рішення групи відносно того, яким способом плавати.
Потім дослідники пов’язали двох роботів через інтернет. Оскільки бджоли притягувалися до одного чи іншого робота, ця інформація могла передаватися роботу-рибі, який інтерпретував цю подію як більшу кількість риб, які обирають напрямок плавання – за годинниковою стрілкою або проти годинникової стрілки. Та навпаки, інформація про напрямок плавання риби у групі могла передаватися від робота-риби до робота-бджоли, що інтерпретувало сигнал як більшу кількість бджіл, які збираються навколо робота. «Коли ми встановлюємо зв’язок між двома роботами, вони діють, як перекладачі», – каже Боннет.
Рибки даніо зазвичай плавають групою, але не завжди у одному напрямку; вони часто змінюють курс. Але коли робот-рибка отримував інформацію від робота-бджоли, риба досягала консенсусу протягом декількох хвилин або довше. Це тому, що молоді медоносні бджоли, коли робот у їх колонії не отримував інформацію від рибного робота, через 15 хвилин влаштовувалися з одним з двох роботів.
Та навпаки, нерішучі схеми плавання риби впливали на поведінку медоносних бджіл. Якщо робот-риба ділився інформацією з бджолиною колонією, бджоли продовжували рухатися вперед ітаназад між двома джерелами тепла протягом усього 30-хвилинного випробування. Якщо зв’язок був двостороннім, бджоли збиралися навколо робота, але на це потрібно було ще 5 додаткових хвилин.
«Технічна сторона експерименту дуже вражає! Я переконаний, що мала місце якась форма спілкування» – говорить Гарньє. Але він задається питанням, як технологія буде використовуватися у подальшому. «Я не впевнений щодо того, де саме може бути використаний результат цього експерименту».
Гай Тераулаз, який вивчає колективну поведінку у Дослідницькому центрі по пізнанню тварин при CNRS у Тулузі, Франція, солідарний з колегою:
«З біологічної точки зору ми нічого не дізнаємося», – зазначає він, додаючи, що з інженерної точки зору ключовим аспектом експерименту є інтеграція роботів в співтовариства тварин, що вже було зроблено. «Все це трохи тривіально», – говорить він.
А що ж далі?
Дослідники стверджують, що експеримент, що підтверджує концепцію, вказує на нові підходи до дослідження взаємодії живих організмів один з одним. «Це дозволяє нам проводити експерименти з тваринами для побудови математичних моделей їх поведінки» – каже Халл.
Ніколь Абейд, інженер з Virginia Tech, яка не була залучена до дослідження, також могла побачити, що цей тип роботів дає уявлення про те, як найкраще розробляти багаторівневі робототехнічні системи, такі як роботизований рій, у якому багато маленьких роботів діють в унісон.
«У той час, як у більшості так званих розподілених систем використовується безліч роботів одного типу, інженери починають експериментувати з пристроями різних типів, наприклад з квадрокоптером та наземним транспортним засобом» – говорить Абейд. Вона також підтвердила, що сама можливість спостерігати міжвидову взаємодію із застосуванням робототехніки є дуже цікавою».
Відео експерименту ви зможете побачити за цим посиланням:



Коментарі можуть залишати тільки зареєстровані користувачі